|
|
|||
|
PID & MICRO - 4 |
|||
|
|||
|
|
|||
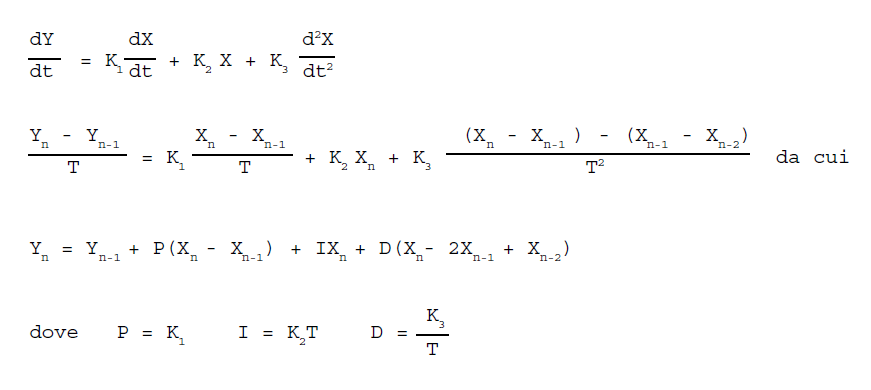
| Implementazione software della funzione PID
La realizzazione pratica di un sistema di regolazione ad
anello chiuso con rete correttrice di tipo PID richiede normalmente una
componentistica di tipo analogico; per esempio un effetto di tipo
integrativo lo si ottiene inserendo nell'anello una rete ritardatrice
costituita da un partitore RC (R in serie e C verso massa) capace di
integrare nel tempo il valore dell'errore. Un effetto derivativo
richiede invece una rete anticipatrice costituita da un partitore RC (C
in serie e R verso massa) capace di lasciar passare le rapide
variazioni dell'errore.
Essendo una funzione discretizzata, è stato introdotto il
tempo T di aggiornamento dell'equazione; questo è l'intervallo che
intercorre tra due successivi aggiornamenti del valore dell'uscita Y
della funzione. Conseguentemente i valori delle variabili X ed Y sono
stati
Dalle formule precedenti si deduce che per tale ridefinizione si è considerato:
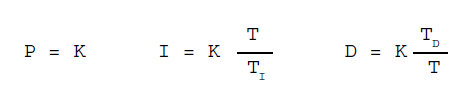
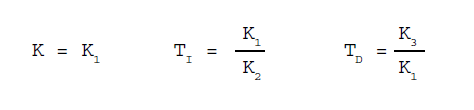
Il valore K si dice costante
di proporzionalità o
guadagno proporzionale, il tempo TI
tempo integrativo ed il tempo TD
tempo derivativo. la costante K è espressa nel rapporto delle unità di
misura di Y su X, mentre i tempi TI
e TD sono normalmente espressi
in
secondi così come il tempo T di ripetizione dell'aggiornamento.
Si consideri che su un sistema a microprocessore può
essere vantaggioso utilizzare unità di misura diverse da quelle più
comuni allo scopo di eseguire operazioni solo su grandezze di tipo
intero. Per esempio le costanti di tempo possono essere espresse in
decimi di secondo, mentre la costante K può essere premoltiplicata per
1000 per considerarne tre cifre decimali pur utilizzando un valore
intero. In tal caso occorrerà dividere tutta la parte incrementale (a
destra del termine Yn-1) della formula per lo stesso fattore 1000 per
aggiustarla alla nuova unità di misura di K. Si noti che l'utilizzo di
unità di misura delle costanti di tempo diverse ma tra loro omogenee
non richiede aggiustaggi della formula in quanto i termini contengono
sempre rapporti di valori temporali. Infine per quanto riguarda i
valori analogici di ingresso X e di uscita Y della formula si possono,
con opportune scelte, considerare ancora solo numeri interi. Per
esempio se la lettura della temperatura reale R è effettuata mediante
un convertitore analogico/digitale a 8 bits dove lo stadio di
amplificazione e offset del sensore sono stati tarati per fornire il
valore 0-255 in corrispondenza a 0-100 gradi ed inoltre il set point S
è impostabile da 0 a 100 gradi mediante il valore 0-255 di un secondo
ingresso analogico connesso ad un potenziometro, non occorre convertire
in gradi la lettura dei convertitori ma è possibile considerare le
temperature espresse in questa nuova unità di misura intera. |
|
||
|
|
|||
|
|
|||
|
|
|||