|
Riluttanza commutata (MSR)
La tecnologia della riluttanza commutata ・ attualmente
riemersa nelle applicazioni grazie alla rapida diminuzione del costo
delle soluzioni di controllo elettronico. Molti produttori di
apparecchi e le organizzazioni di ricerca stanno attualmente valutando
la fattibilità, le caratteristiche e costo totale del sistema, al fine
di definire soluzioni accettabili.
Ci sono varie topologie di stadio di potenza per pilotare un motore
SMR. Lo stadio più comune utilizza una struttura a
ponte asimmetrico per ciascun avvolgimento come mostrato in figura 10.
Questo schema preleva l'energia corrispondente all'alimentatore. Essa
permette inoltre la sovrapposizione delle sequenze di conduzione
(conduzione simultanea di due fasi adiacenti) per dare la coppia
massima e la velocità. Questa topologia e' versatile e
robusta, in quanto non vi e' alcun rischio di corto circuiti nei
rami del ponte perché ogni avvolgimento del motore e' in
serie con i transistor di ogni ramo del ponte. Di solito, il controllo
globale comprende due cicli di controllo: il ciclo di
auto-commutazione, che coinvolge i sensori di posizione che sono di
numero pari agli avvolgimenti, e il ciclo di regolazione della velocità in
cui si regola la corrente mediante il controllo del duty cycle del
segnale PWM.
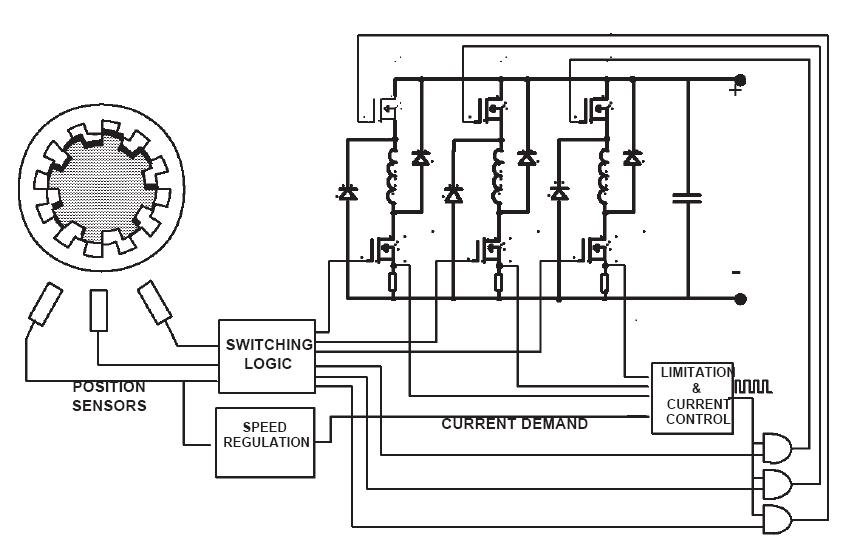
Figura 10. ponte trifase asimmetrico per
controllo di un MSR con tre sensori di posizione del rotore.
Topologia semplificata per un SMR
La riduzione i costi degli apparecchi domestici e
dei costi totali del sistema, e, di conseguenza, il numero di
componenti elettronici e' un obiettivo fisso. Gli MCUs apportano un
valido contributo in questa direzione, dal momento che la loro ampia
gamma di funzionamento di alimentazione, la loro robustezza, l'immunità・ e
la vasta gamma di periferiche disponibili onchip riducono drasticamente
il numero dei componente esterni e il costo totale dell'applicazione.
Una soluzione con micro per il controllo di un SMR e' quella in cui si
utilizza un singolo sensore di posizione. I segnali dei due sensori
mancanti sono ricostruiti dal microcontrollore risparmiando due
sensori. Il microcontrollore misure anche la velocità,
esegue l'algoritmo di controllo, e regola il segnale PWM per garantire
la velocità del motore voluta. Lo schema semplificato di
controllo del motore SMR mediante micro,
riportato in Figura 11, permette di risparmiare due transistor di
potenza e due diodi veloci. La parte superiore del ponte e' costituita
da un solo transistor, controllato dal segnale (PWM), che distribuisce
la corrente in ogni avvolgimento quando il transistor nel lato
inferiore del ponte e' acceso. Il microcontrollore attiva il transistor
superiore tramite il traslatore di livello ( L6380). I tre transistor
del lato inferiore del ponte sono comandati dal micro tramite il
traslatore a di livello a tre uscite (TD300), che assicura una
protezione al corto circuito e in corrente. Lo stadio di potenza
comprende quattro transistor MOS di potenza e quattro diodi veloci. I
transistor della parte alta del ponte e i relativo diodo veloci commuta
ad alta frequenza, per cui deve essere dimensionato in modo da portare
una corrente dei tre avvolgimenti. Ciascun transistor del lato
inferiore del ponte possono essere piu' piccole, in quanto hanno solo
per passare la corrente di un avvolgimento a bassa frequenza.
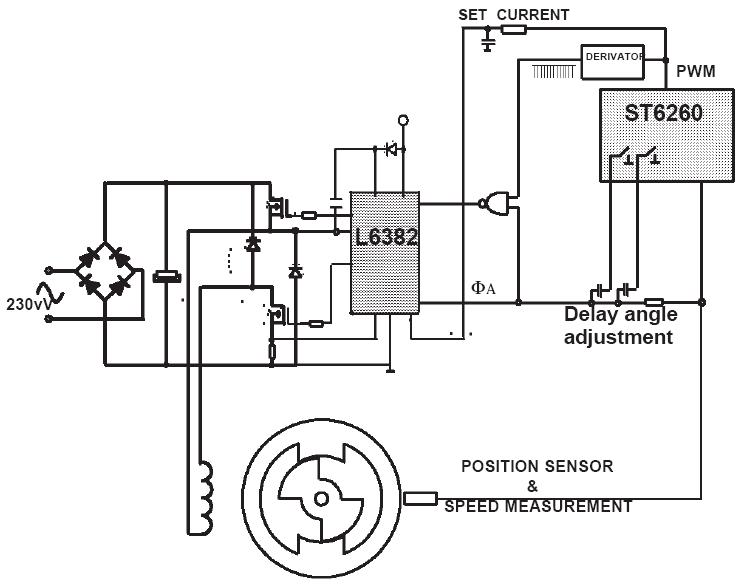
Figura 11. Semplificato basso costo ST62 MCU
soluzione guida trifase SRM utilizzando un unico sensore di posizione
del rotore.
Figura 12. Semplice motore per una singola fase riluttanza a
motore acceso fornito in modalità corrente, controllate da un ST6260 MCU
Conclusioni
L'uso di MCU nei sistemi di controllo
elettronico del motore diventerà sempre più comune, grazie
alla disponibilità di MCU semprepiù flessibili, affidabili e di basso costo, come
il micro STM32, della
STMicroelectronics o i PIC della MicroChip dove
l'integrazione su chip di potenti risorse e periferiche, l'ampio gamma
di
alimentazione, la robustezza e l'immunità ai rumori
consentono al
progettista di ottenere sistemi efficienti con costi totali molto bassi.
|
|