|
|
|||
|
MOTORI ELETTRICI &CONTROLLO |
|||
|
|||
|
|
|||
|
Controllo Chopper Il motore universale può essere
alimentato da tensione AC rettificata e può' essere acceso /spento ad
alta frequenza da transistor MOS di potenza. Il controllo della
velocita' e' ottenuta adeguando il duty cycle del segnale di chopper. A
causa della tensione di rettifica, l'ondulazione ( ripple) e' bassa,
e le perdite sono limitate. 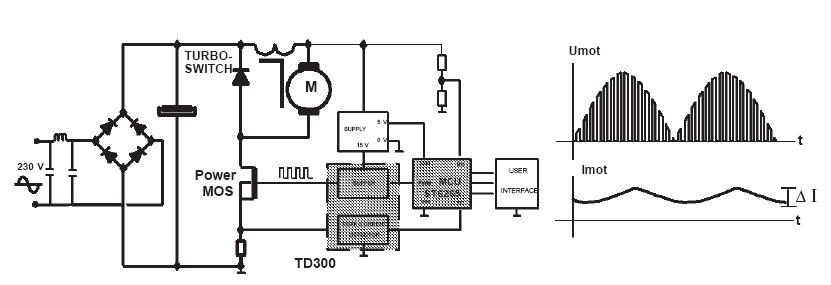 Figura 4. motore universale controllato con modalità Chopper La forma d'onda della corrente di rete e' sinusoidale,
e quindi non genera armoniche a bassa frequenza. La modalità di
controllo Chopper e' un mezzo efficace per conformarsi alle norme IEC
1000-2-3 sulle armoniche. La
corrente pulsante alla frequenza di chopper deve essere filtrata per
rimuovere le componenti alla frequenza di commutazione e superiori, ma
il filtraggio ha bisogno di induttanza piccole, e quindi a basso costo,
in quanto frequenza può essere elevata (5 - 20kHz). Armoniche e potenza Il contenuto armonico a bassa frequenza generato
sulla rete e' fortemente dipendente dal tipo di controllo del
motore utilizzato (angolo di fase o chopper). Per esempio, un
aspirapolvere controllato con modalità angolo di fase a velocità ridotta
(es. conduzione angolo di fase a circa 90 ー), produce un
livello molto elevato di armoniche pari (Figura 5). |
|
||
|
|
|||