|
|
|||
|
CAN (Controller Area Network) - 3 |
|||
|
|||
|
|
|||
|
Robustezza e velocità Poiché il CAN è stato inizialmente progettato per l'uso in
auto, per ottenere l'accettazione del mercato si richiedeva una
gestione efficiente degli errori. Con il rilascio della versione 2.0B
della specifica CAN, la velocità massima di comunicazione (bit rate) è
stata aumentata a 1Mbit/sec 8 volte piu’ veloce rispetto alla specifica
della versione 1.0. A questa velocita’, solo la maggior parte del
parametri tempo-critici possono essere trasmessi in serie, senza
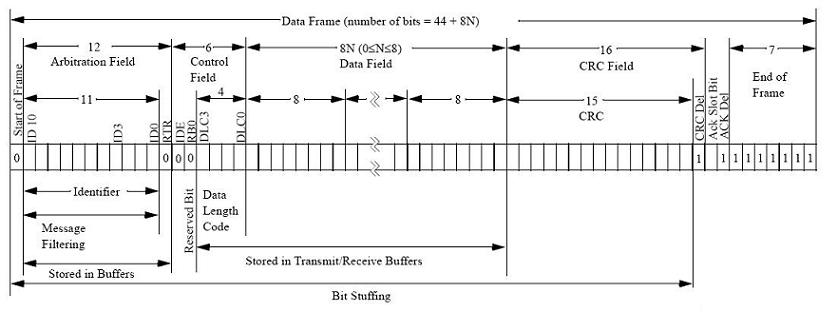
preoccupazioni di latenza. Descrizione della struttura dei messaggi CAN Il protocollo CAN definisce quattro diversi tipi di messaggi
(o frame). Il primo e il più comune tipo di messaggio è il Data
Frame. Questo e' usato quando un nodo trasmette informazioni a uno
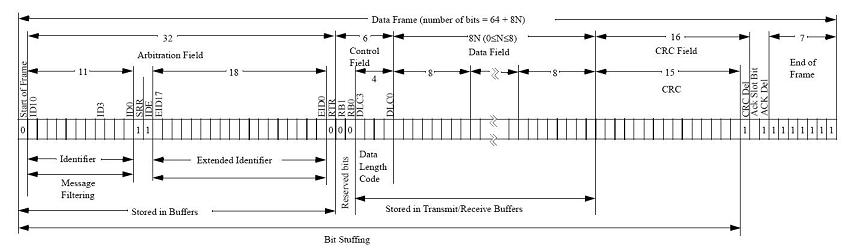
o a tutti gli altri nodi del sistema. Il secondo tipo di messaggio e'
il Remote Frame, che è fondamentalmente un frame di dati con il
bit RTR impostato per indicare che è una Richiesta di trasmissione
remota. Gli altri due tipi di frame sono utilizzati per la gestione
degli errori: Error Frame e Overload Frame. I frame di
errore (Error Frame) sono generati da nodi che rilevano uno
qualunque dei tanti errori di protocollo definiti dallo standard CAN. I
frame di sovraccarico Overload Frame sono generati dai nodi che
richiedono più tempo per elaborare i messaggi già ricevuti.
Fig. 2 - struttura competa del frame di dati standard (STANDARD DATA FRAME)
Fig. 3 - struttura competa del frame di dati esteso (EXTENDED DATA FRAME) |
|
||
|
|
|||
|
|
|||
|
|
|||