|
|
||||||||||||||||||||||||||||||||||||
|
MST_K800 -
TACHIMETRO DIGITALE PER MOTORI LAVATRICE - 2 |
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||
Descrizione del tachimetroCome accennato nella
introduzione il tachimetro digitale MST_K800 e' stato progettato per
essere accoppiato ai motori di lavatrice dotati di sensore
tachimetrico. Questo tachimetro è molto utile se si utilizza un
controllo della velocità del motore per avere una buona e precisa
indicazione del regime di giri del motore. Particolarmente adatto
quando si utilizza il regolatore di velocità con controllo della coppia
MST_K07_CL. Il tachimetro MST_K800 implementa la tecnica della lettura della frequenza del segnale uscente dal sensore. Nella figura seguente è illustrato lo schema a blocchi del tachimetro. 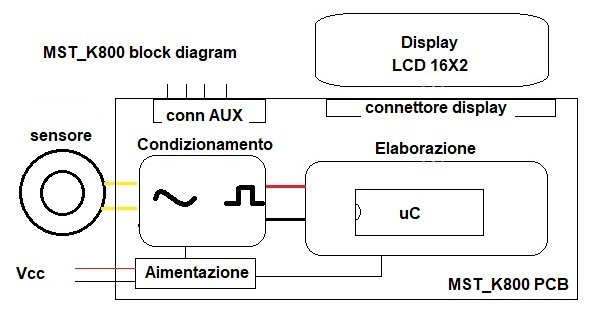 Figura 2: schema a blocchi del circuito del tachimetro
MST_K800
Come si può vedere il
tachimetro e' composto essenzialmente da tre blocchi: Elaborazione, Condizionamento, Alimentazione: Il blocco elaborazione è quello principale basato su un microcontrollore a 8 bit. Questo gestisce l' elaborazione del segnale provenite dal circuito di condizionamento e pilota il display LCD 16X2 basato sul protocollo HD44780. In poche parole il micro implementa un frequenzimetro in quanto legge la frequenza del segnale uscente dal circuito di condizionamento. L'elaborazione consiste nel dividere la frequenza del segnale per un fattore N pari al numero di poli di cui composto il sensore. In genere il numero di poli e' di 8. Il segnale diviso viene misurato in frequenza per un intervallo di 2 secondi per generare il valore RPM attuale e mediato su 4 intervalli di misurazione per generare l'informazione AVG visualizzata sul display. Il display mostra anche lo stato del motore (RUN o STOP). Se indichiamo con Fin la frequenza del segnale uscente dal sensore la formula che ci permette di ricavare il valore dei giri espressi in RPM è: RPM= (Fin/ N) * 60 per N=8 la formula diventa: RPM= (Fin / 8) * 60 Per cui per esempio ad
una frequenza Fin= 2kHz
( massima consentita in ingresso) corrisponde un regime di rotazione di
15000 RPM. Il blocco condizionamento e' un circuito che ha il compito di squadrare il segnale sinusoidale proveniente dal sensore e renderlo compatibile all'ingresso del micro che lo legge. E basato su un transistor ed e' la versione su PCB del circuito di condizionamento per il progetto dig_rpm versione freq_mode. l blocco alimentazione serve per generare la tensione interna di funzionamento del K800 abbassando la tensione ingresso al valore regolato di 5V. Questa tensione alimenta il microcontrollore, il display e il LED di backligth del display. La tensione di alimentazione e' anche presente sul pin 1 del connettore AUX a 4 poli ( utilizzabile per interfacciamento con il MST_K07_CL).
Nella tabella seguente sono riportate le principali caratteristiche elettriche del tachimetro digitae MST_K800.
Tabella 1: caratteristiche elettriche del tachimetro digitale *
La frequenza Fin e' quella del segnale uscente dal sensore. Al valore
massimo di questa corrisponde un regime di rotazione di 15000 RPM
|
||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||
|
|