|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
MST_K16S - REGOLATORE DI VELOCITÀ PER MOTORI IN CC |
||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
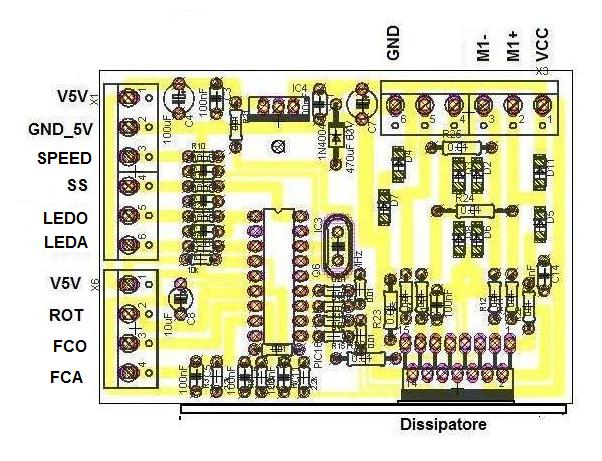
Collegamenti Elettrici In figura è riportato il PCB del circuito e la mappatura dei segnali nei diversi connettori che consentono i collegamenti del circuito alle alimentazioni, ai controlli e al motore.
Tabella corrispondenza ingressi - funzione
Collegamento ingressi
alimentazione L’alimentazione del circuito è fornita tramite i
morsetti Vcc per il
positivo e tramite GND per il negativo.
La tensione d’alimentazione deve essere di tipo continua e
stabilizzata. Il valore minimo è di 8V e massimo di 30V. Per evitare
danneggiamenti dovuti all’inversione di polarità, è necessario mettere,
in serie al polo positivo, un fusibile con
portata maggiore alla corrente massima assorbita dal circuito. Collegamento uscite M+ e M+ Il polo positivo e negativo del motore da controllare vanno
collegate rispettivamente alle uscite M+
e M-. In rotazione oraria su M+
e’ presente il segnale PWM mentre M- e’
messo a GND. In rotazione anti-oraria su M-
e’ presente il segnale PWM mentre M+
e’ messo a GND. Collegamento uscita V5V Dal morsetto contrassegnato con
V5V e’ possibile prelevare la tensione regolata a 5V
per alimentare circuiti, sensori ed altro esterni al
circuito del regolatore. La massima corrente prelevabile e’ di 500mA. Collegamento alle uscite LEDO e
LEDA Le uscite LEDO e LEDA
segnalano lo stato degli ingressi FCO e FCA.
Queste uscite sono di tipo open-drain e possono pilotare carichi
massimi di 15mA e tensione massima di 5V. Ad esse possono essere
connesse diodi LED nel caso di
segnalazione ottica o possono essere trattati come segnali di
ritorno/allarme per sistemi di controllo
remoto. Nel caso si colleghino diodi LED bisogna collegare l’anodo del
diodo alla tensione di 5V (prelevabile
dalla morsettiera V5V) e il catodo ad una delle due uscite tramite un
resistore per limitare la corrente. Tipicamente, il
valore della resistenza può variare da 270 a 1000 ohm. Nel caso in cui LDA
e LDO generano un segnale di ritorno/allarme bisogna collegare
un resistore tra la 5V e una delle due uscite e mandare al sistema
remoto la tensione sull’uscita (vedi schema applicativo per controllo
remoto). Collegamento degli ingressi FCO e FCA Nel caso in cui FCO e FCA sono collegati a sensori di fine corsa questi devono essere di tipo normalmente chiuso (NC) o usare i contatti disponibili nella configurazione NC in modo da garantire la 5V in condizione normale di funzionamento. Quando il fine corsa e’ attivato il contatto deve aprirsi in modo da togliere la 5V all’ingresso di fine corsa relativo. Nel caso di controllo remoto il sistema deve togliere la 5V all’ingresso relativo al verso di rotazione da bloccare.
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||