|
|
||
|
MST_K08
- REGOLATORE
DI VELOCITA' PER MOTORI DI LAVATRICE CON GESTIONE DEL VERSO DI
ROTAZIONE - 8 |
||
|
||
|
|
||
|
Il
regolatore MST_K08 può essere
controllato da una scheda esterna interfacciandola mediante il
connettore dei comandi e, se possibile, anche alimentarla ( si può
prelevare la 5V con max 500mA di assorbimento). Ricordiamo che il
MST_K08 non e' isolato dalla rete per cui bisogna usare dei circuiti di
interfacciamento che garantiscano l'isolamento (contatti puliti di relè , opto isolatori). Presentiamo a seguire due casi in cui mostriamo come controllare il MST_K08 con una scheda Arduino_Nano e un generico PLC.
Classico esempio
e' l'utilizzo della scheda Arduino nelle sue diverse versioni. In
questa pagina riportiamo il caso in cui il regolatore MST_K08 e'
controllato direttamente dalla scheda Arduino versione Nano R3: oltre a
poter settare la velocità del motore si può gestire il verso di
rotazione, la partenza e l'arresto. Il regolatore MST_K08 si presta
particolarmente in quanto e' dotato di alimentatore interno a 5V ( e'
presente un AC-DC 220V- 5V) che può quindi alimentare la scheda
Arduino senza ricorrere ad alimentatori esterni o la presa
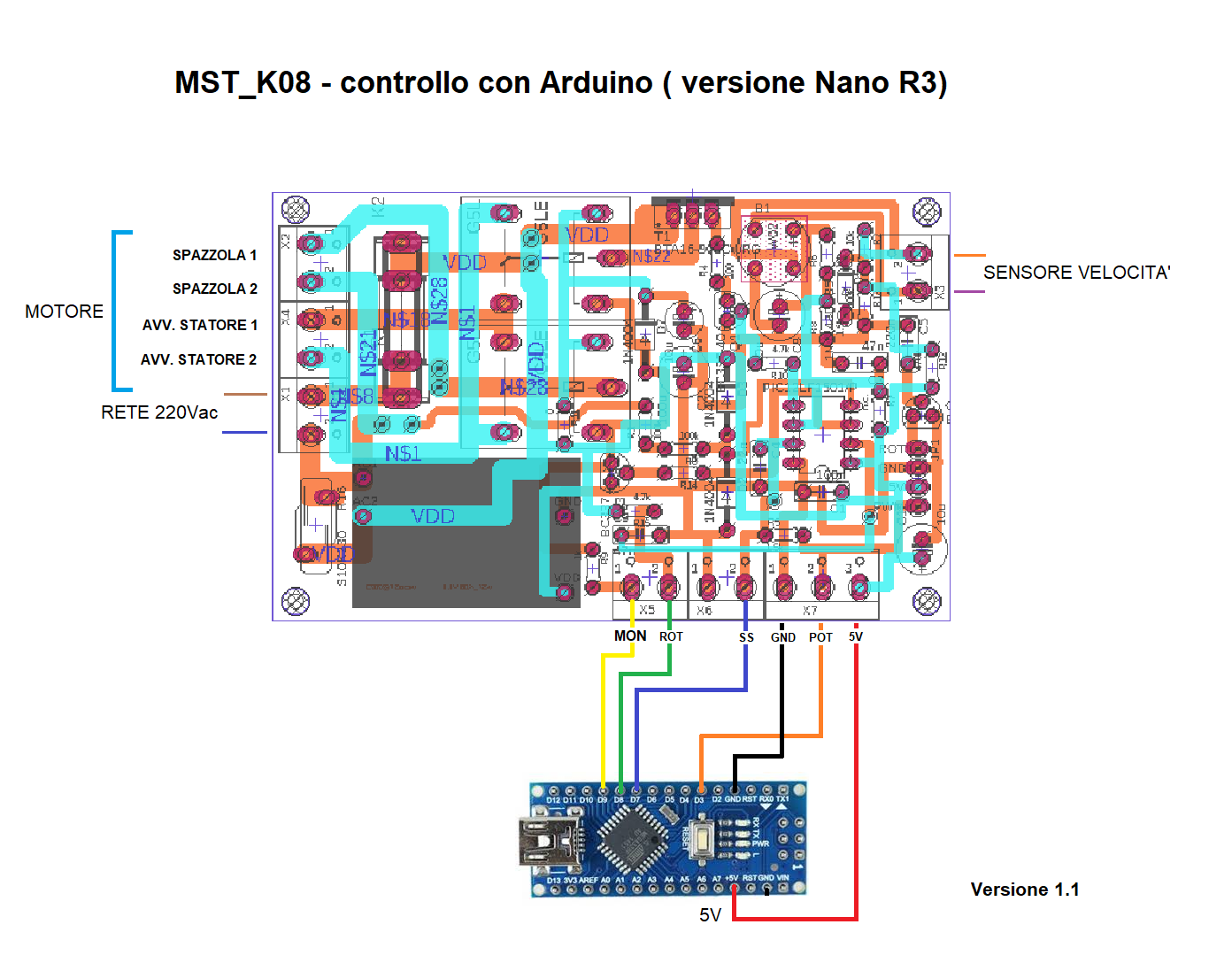
USB. In figura 6 e' riportato lo schema dei collegamenti tra MST_K08 e
la scheda Arduino Nano ( si possono usare altre versione della scheda Arduino).
Fig. 6 - Schema collegamento MST_K08 e Arduino ( versione Nano R3) Bastano quindi solo 6
fili per collegare il MST_K08
alla scheda Arduino: 3 per l'alimentazione
e 3 per il controllo. In particolare la linea ROT , MON e SS devono essere delle linee I/O
digitali per attivare /
disattivare la relativa funzione mentre linea POT deve essere una
tensione ( tra 0 e 5V) per il settaggio della velocità di
rotazione del motore. Queste assunzioni implicano delle scelte su come
configurare le porte della scheda Arduino connesse con ROT, SS e POT.
Il
regolatore MST_K08 può essere
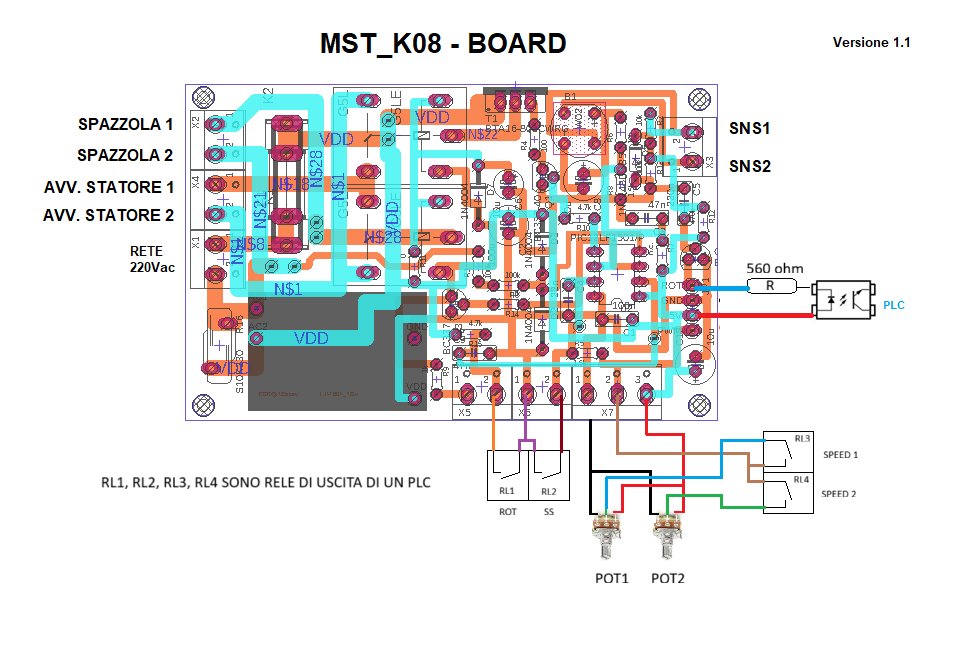
controllato anche da un PLC come mostrato nella figura 6b.
Fig. 6b - Schema collegamento MST_K08 e PLC Utilizzando
le uscite a relè del PLC si possono controllare in maniera
isolata i comandi di SS ( START & STOP) e di ROT. Per quando
la regolazione si possono usare dei relè' per convogliare all'ingresso
di controllo velocità (VPOT) diverse tensioni ottenute con dei
partitori resistivi o potenziometri. Nel caso della figura 6b si usano
due potenziometri per avere a disposizioni due valori di velocità
selezionabili tramite i relè RL3 e RL4. Infine, se si vuole leggere
il numero dei giri del motore sfruttando il segnale
tachimetrico digitalizzato presente sul pin VROT della porta AUX,
si può' usare un circuito con opto isolatore come mostrato in figura
6b. Ricordiamo che la frequenza del segnale tachimetrico, in quasi
tutti i motori delle lavatrici, e' 8 volte quella corrispondente
ai giri al minuto o RPM. Nota la frequenza f_rot del segnale tachimetrico digitalizzato i RPM sono dati da : RPM = (f_rot / 8) x 60 Particolare attenzione bisogna porre nel maneggiare il regolatore in quanto opera sotto rete elettrica con conseguente pericolo di scosse elettriche!
|
||
|
|
||
|
|